
Taylor Spatial Frame
To check our simulators, please select:
A repository of results from analyses of the TSF rings:
TSF Rings
To find failure load for a TSF strut (inactive):
Strut Solver (inactive)
To visit manufacturer's website:
https://www.spatialframe.com/
Introduction
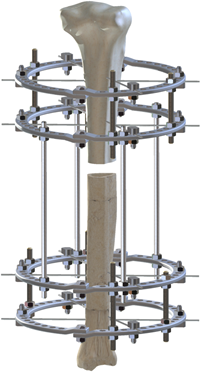
Taylor Spatial Frame ( TSF; Smith and Nephew, Memphis, Tennessee ) is a circular (ring) external fixation system introduced to the market in 2003 by Smith & Nephew, Memphis, Tennessee , which was granted a patent for TSF in 2001. shows an application of TSF for lengthening of tibia.

TSF is a type of external orthopaedic fixator developed by Dr. Charles Taylor (Taylor, 2002). It belongs to the category of circular or ring fixators, in which bone is fixed to a set of rings or ring-sections, via transosseous pins or wires ( ). TSF was developed based on Stewart-Gough hexapod design. From the Stewart-Gough platform; TSF inherits the idea of six legs connecting a mobile platform to a stationary base, where the motion of the mobile platform (relative to the base) is controlled by the length of these legs (Taylor, 2002). This notion was then transplanted into Ilizarov concept of ring orthopaedic fixators, by replacing the connecting rods with six length-adjustable (telescopic) legs (called struts) attached to the rings with universal joints (Iyun, Borschneck, & Ellis, 2002; Simpson, Borschneck, & Ellis, 2005), as illustrated in .
As a hexapod, TSF is kinematically capable of providing the bone segments with full mobility in all six degrees of freedom (Taylor, 2002; Iyun, Borschneck, & Ellis, 2002; Simpson, Borschneck, & Ellis, 2005). It means that all types of deformities can be corrected with the same configuration of the fixator, simply by adjusting the strut lengths to the desired values. This is a clear advantage over the traditional ring fixators of Ilizarov type, in which hinges or translation-rotation parts should be added for correction of angular, shear or torsion deformities.
shows a real life application of TSF. As seen in , TSF is based on a six-legged (hexapod) design, which can be considered as a clinical adaptation of original hexapods designs as used broadly in engineering applications known by the name of Stewart-Gough A precursor of TSF - as a type of ring fixation apparatus - is Ilizarov fixator, introduced in 1950's by professor G. A. Ilizarov, which is shown in . Therefore, TSF can be regarded as an incorporation of Stewart platform design in Ilizarov orthopaedic fixation device. In fact it has been argued that the Taylor spatial frame (TSF) fixator, which was invented by Dr. J. Charles Taylor of Memphis USA (1990), was designed to overcome these difficulties of the use of the Ilizarov fixator (Chaudhary, 2007).
