
is dedicated to web-based computational solutions
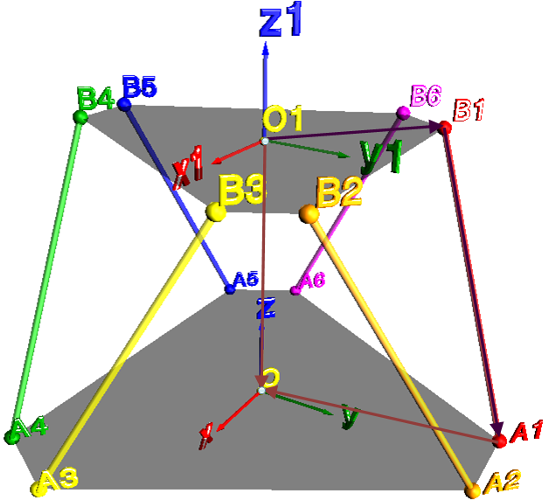
A solver for Forward Kinematics (FK) and Inverse Kinematics (IK) of general 6-6 parallel manipulators AKA Stewart-Gough Platforms. It visualises the defined manipulator in real-time and in 3D. With seamless FK to IK switch and vice versa.
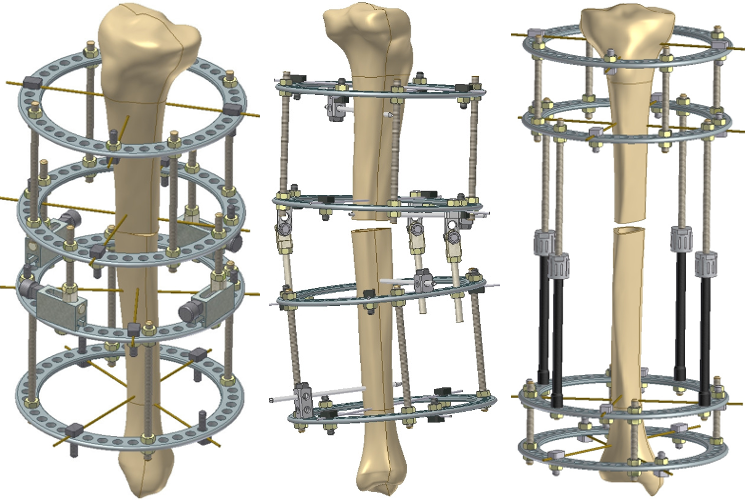
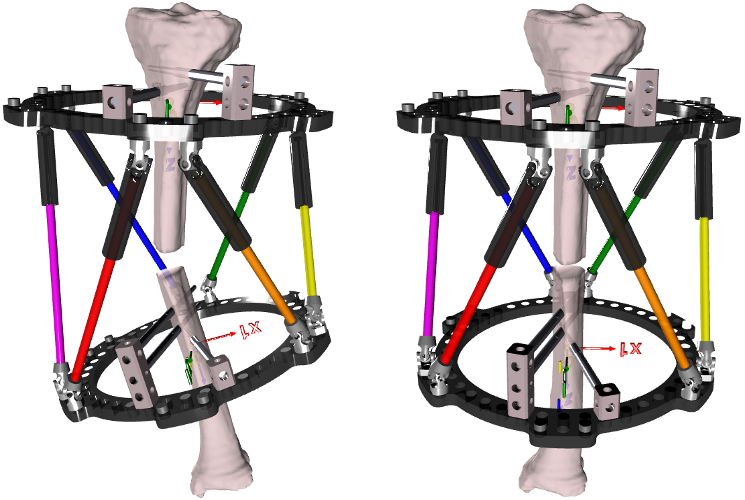
A real-time 3D simulation tool for Taylor Spatial Frames (TSF) ring fixators. The skeletal correction procedure can be preplanned with real-time animation of the correction.